
智能化宝藏寻迹小车
- 成果编号
- 40921
- 完成单位
- 江南大学
- 完成时间
- 2023年
- 成熟程度
- 研制阶段
- 价格
- 面议
- 服务产业领域
- 电子信息
- 单位类别
- 211系统院所
| 科技计划 | 成果形式 |
|---|---|
| 新产品 | |
| 合作方式 | 参加活动 |
技术开发、技术服务、人才培养 |
|
| 专利情况 | |
未申请专利 |
| 综合介绍 |
|---|
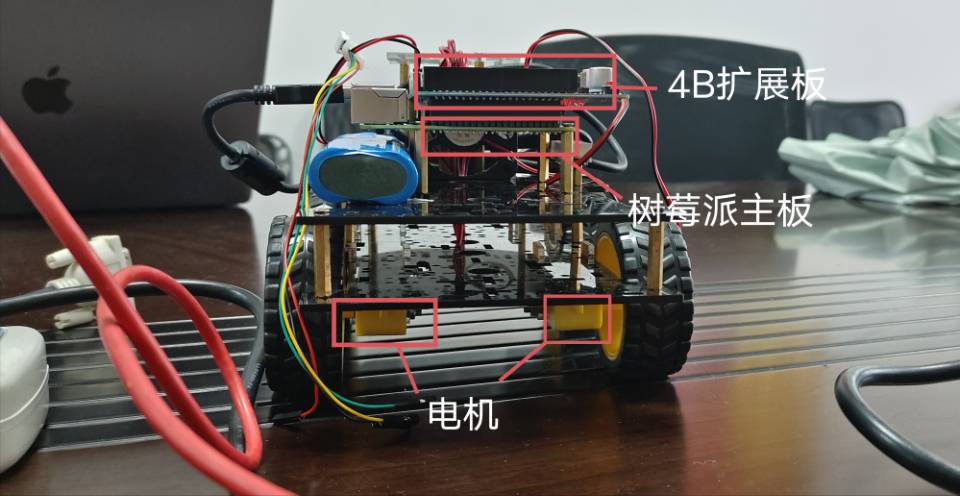
我们利用树莓派及电机等器材搭建起小车的基本构架,利用OpenCV图像识别实现判断小车宝藏的颜色和形状,以分辨敌我方宝藏及伪宝藏。利用KLD-AMCL算法结合传感器得到的局部地图数据来实现小车的定位和小车航向的确定。采用算法让小车在众多路径中找到一条无障碍物且最短的路径。采用栅格地图的方法把复杂的迷宫分解成大小一样的栅格,便于路径的规划。最终尽可能用最小的时间,获得所有我方宝藏并顺利走出迷宫。 |
| 创新要点 |
自主巡线避障小车,识别地图和宝藏。 |
| 技术指标 |
无 |
| 其他说明 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |